The Nao robot is a humanoid robot build by Aldebaran Robotics, which is since 2022 part of United Robotics.

The Nao robot was initial designed in 2005 by Bruno Maisonnier and proposed as Standard Platform for the RoboCup in 2008.

The University of Amsterdam actually still has two of the first released Nao V3+ Academic Edition robots (fully functional). Those two robots were used by the Dutch Nao Team to prepare for their first RoboCup games at the German Open in April 2010.
In the following years several new editions of the Nao robot were acquired. Not all those robots are still operational; Aldebaran provides service contracts of typical 3 years.
| Acquired | Type | # | Battery | Processor speed | Camera resolution | Software |
| 2009 | Nao V3+ | 2 | 27.6 Wh | single core 500 MHz | 640×480 | NaoQi 1.14 |
| 2010-2012 | Nao v3.3 | 5 | 27.6 Wh | single core 500 MHz | 640×480 | NaoQi 1.14 |
| 2013-2014 | Nao v4 | 2 | 27.6 Wh | single core 1.6 GHz | 640×480 | NaoQi 2.1 |
| 2014-2018 | Nao v5 | 7 | 48.6 Wh | single core 1.6 GHz | 640×480 | NaoQi 2.1 |
| 2018-2021 | Nao v6 | 6 | 62.5 Wh | quad core 1.9 GHz | 2592×1944 | NaoQi 2.8 |
Aldebaran provides software for developers to program the Nao robots. The Dutch Nao Team actually programs for efficiency reasons the robots in C++ and RUST, but Aldebaran also provides a Python interface. The most accessable way is to program the Nao robots via Choregraphe.
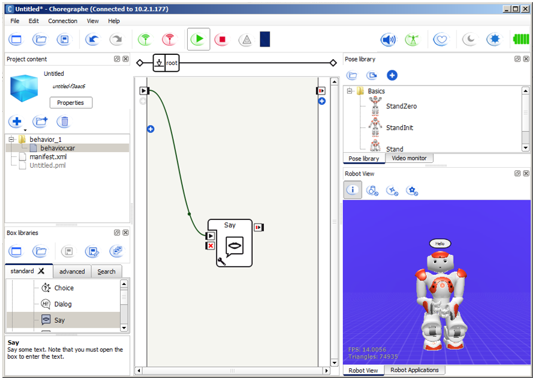
Choregraphe runs on your laptop and allows to combine several programming blocks with visual programming. For instance, in the getting-started is shown how you can let a Nao robot say “Hello”.
The version of Choregraphe on your laptop should match the version of NaoQi running on your robot:
| Nao v6 | Naoqi 2.8 | Choregraphe 2.8 |
| Nao v4 and v5 | Naoqi 2.1 | Choregraphe 2.1 |
| Nao v3+ and v3.3 | Naoqi 1.14 | Choregraphe 1.14 |
Note that the Universal License key provided for Choregraphe on Aldebaran software page (654e-4564-153c-6518-2f44-7562-206e-4c60-5f47-5f45) works for all Choregraphe 2.* versions.
To further learn to program the Nao robot, you could continue with the online python tutorials or with the projects described in the educational Learn it eBook.
Troubleshooting
See this document or this extended version of a startup guide.